ものづくりを未来する。






高品質高耐久のスタンダードモデル
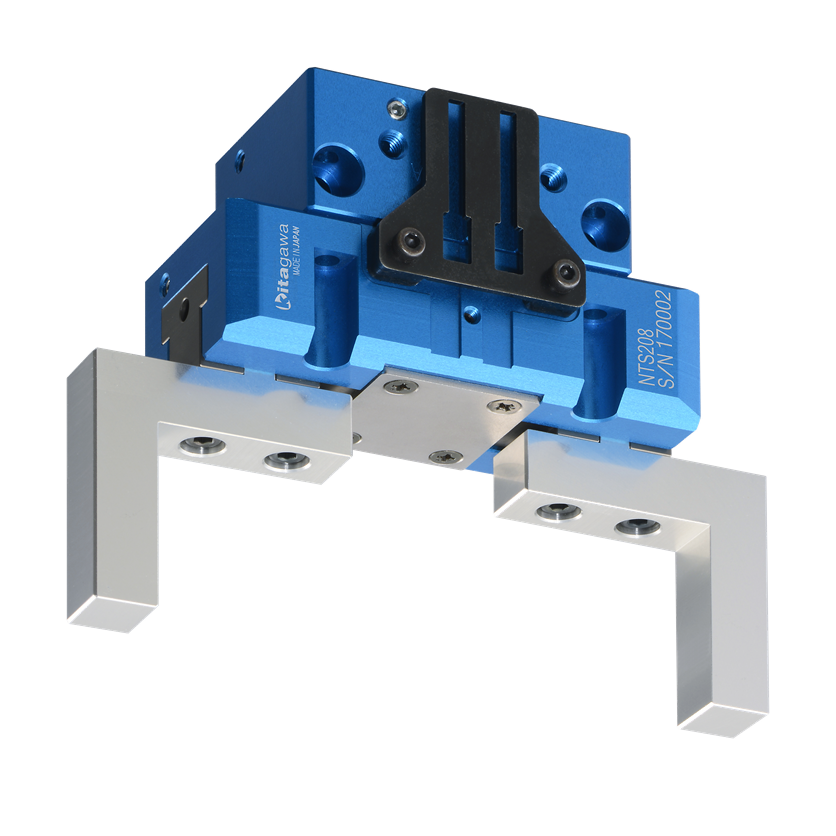
従来品と比べ、切粉対策強化とメンテナンス性向上を実現
高把握力で重量ワークも安定した固定が可能
ロボット可搬重量を制限しない軽量短寸コンパクトボディー
従来品にない低突出しの新型取付け方法を提案
高剛性ボディー採用により把握精度向上を実現
注1 空圧が低下した際にもワークを脱落しないよう空圧回路に逆止弁を使用してください。
注2 リードスイッチブラケットは標準付属しています。
注3 近接スイッチでジョーストロークを直接検出される場合は別途近接スイッチブラケットをお求めください。
型 式 | 直径での | 把持力 F(注2) | 繰り返し精度 | 本体質量 | 流体消費量 | 使用空圧力 | 周囲温度 | ||
|---|---|---|---|---|---|---|---|---|---|
測定距離(注1) | 外径把持 | 内径把持 | |||||||
NTS206 | 12 | 10 | 250 | 280 | ±0.01 | 0.29 | 8.4 | 0.2~0.8 | 5~60 |
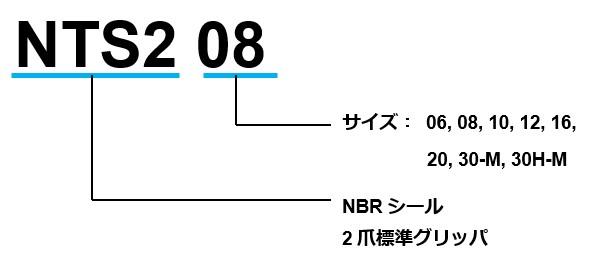
NTS208 | 16 | 10 | 460 | 490 | ±0.01 | 0.48 | 18.8 | 0.2~0.8 | 5~60 |
NTS210 | 20 | 20 | 610 | 680 | ±0.01 | 0.78 | 35.1 | 0.2~0.8 | 5~60 |
NTS212 | 24 | 20 | 850 | 970 | ±0.01 | 1.34 | 52.4 | 0.2~0.8 | 5~60 |
NTS216 | 32 | 20 | 1520 | 1690 | ±0.01 | 2.52 | 123.2 | 0.2~0.8 | 5~60 |
NTS220 | 40 | 20 | 2700 | 2870 | ±0.01 | 5.14 | 272.2 | 0.2~0.8 | 5~60 |
NTS230-M | 60 | 20 | 4750 | 4820 | ±0.02 | 10.4 | 683.4 | 0.2~0.8 | 5~60 |
NTS230H-M | 41 | 20 | 7500 | 7650 | ±0.02 | 10.4 | 683.4 | 0.2~0.6 | 5~60 |
(注1) 測定距離はマスタージョー上面から把握中心までの距離です。
(注2) 把持力は供給空圧力0.6MPaでの値です。
各グリッパの許容負荷は以下のリンクで確認してください。
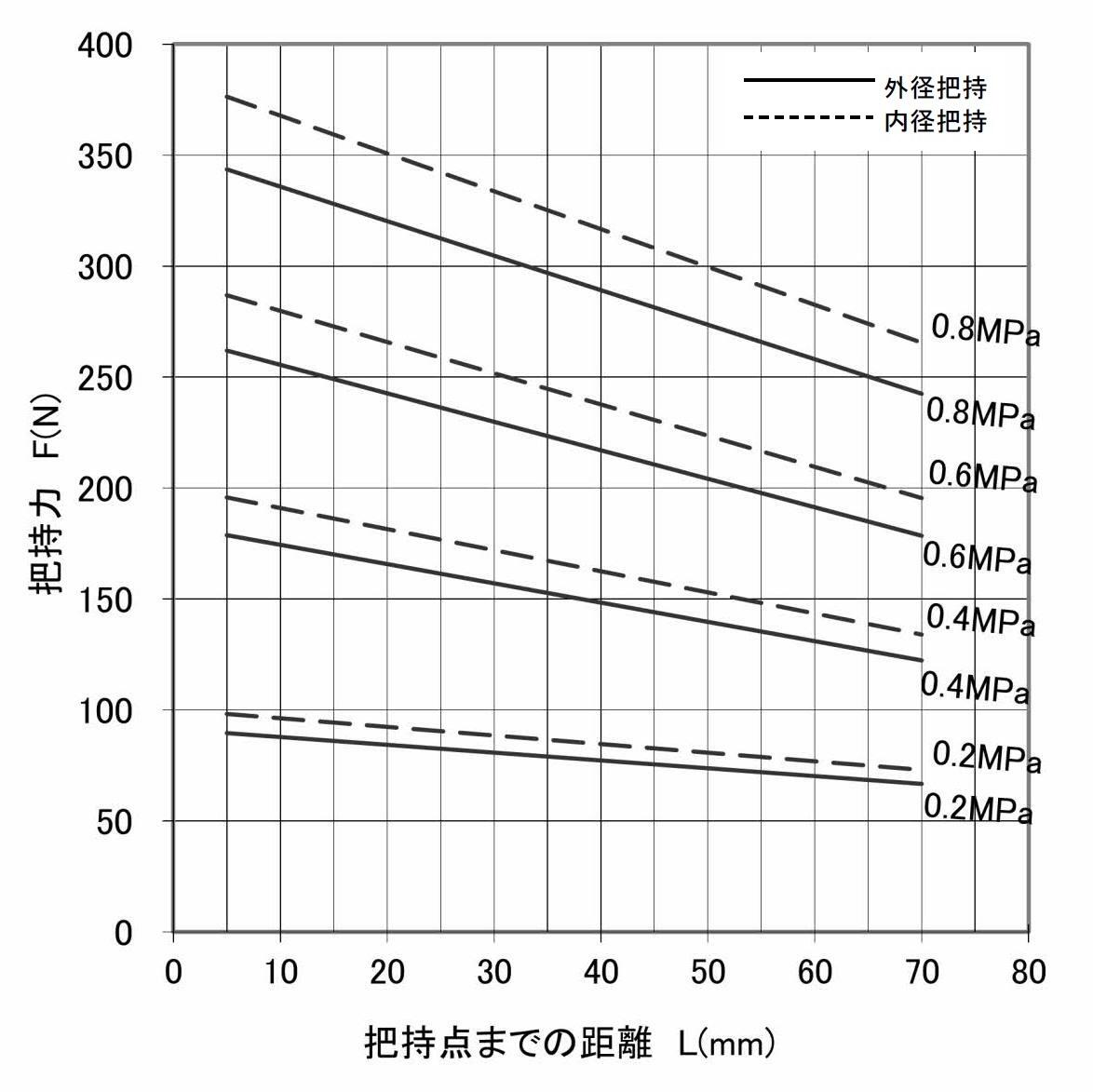
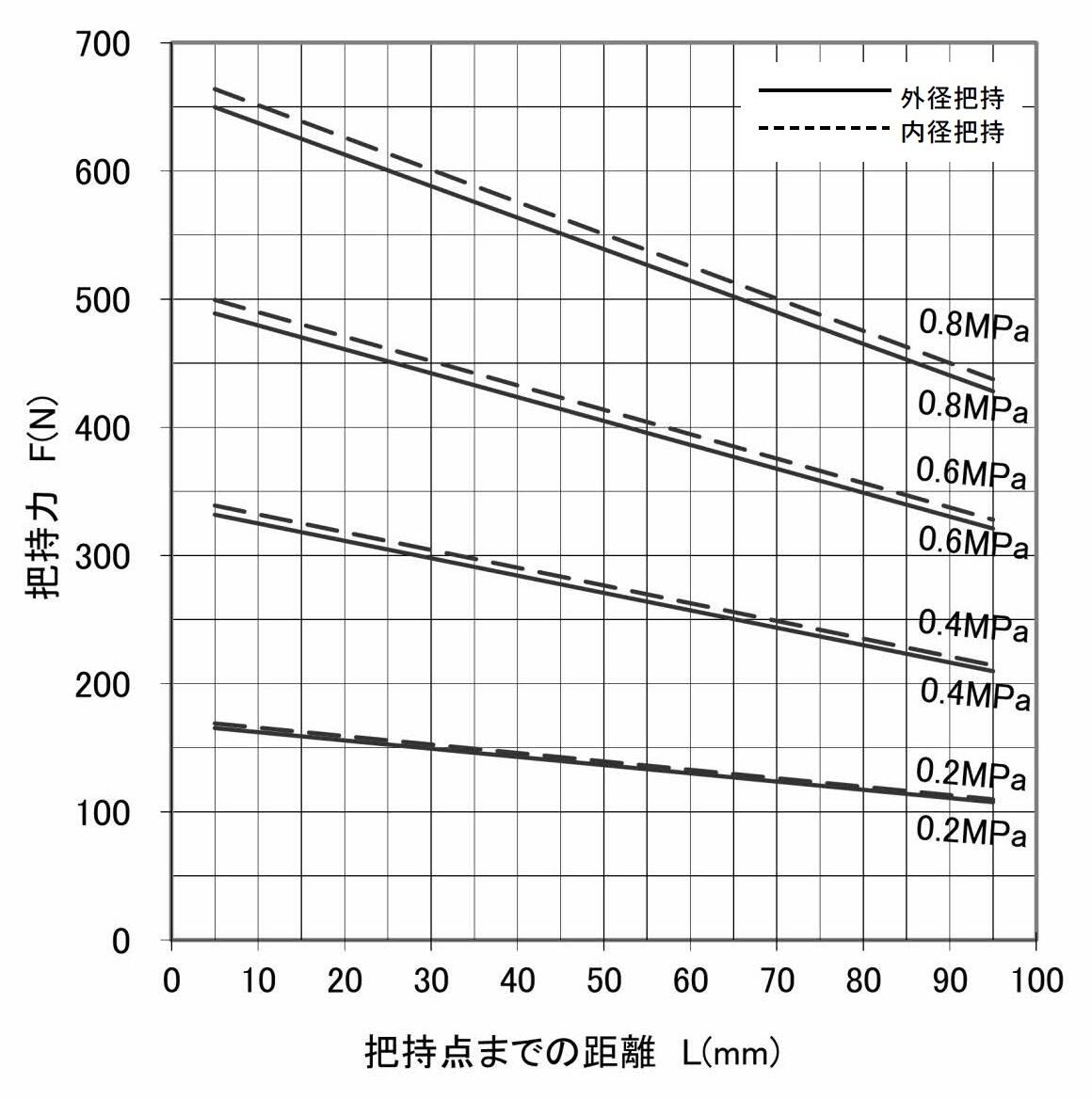
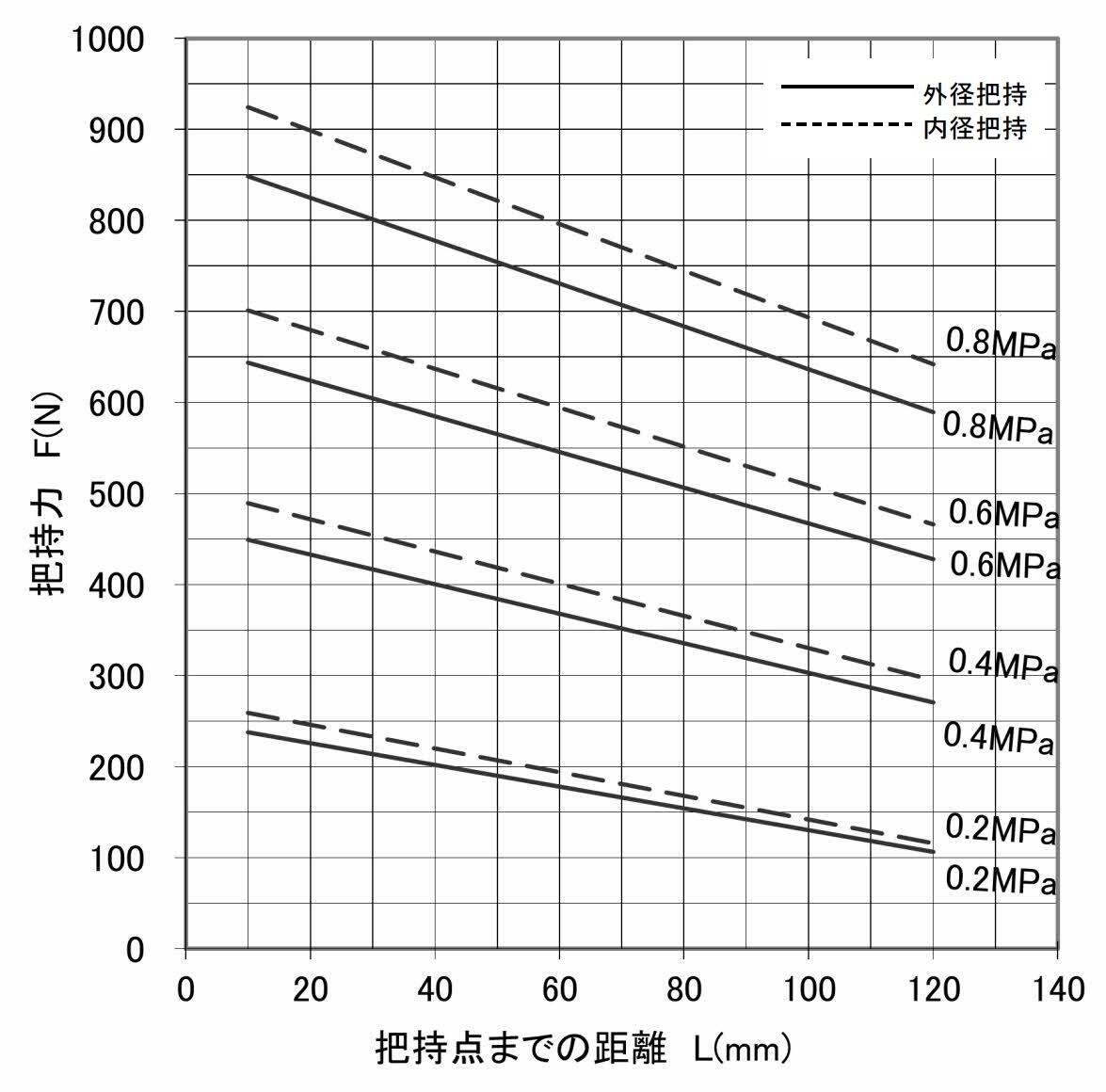
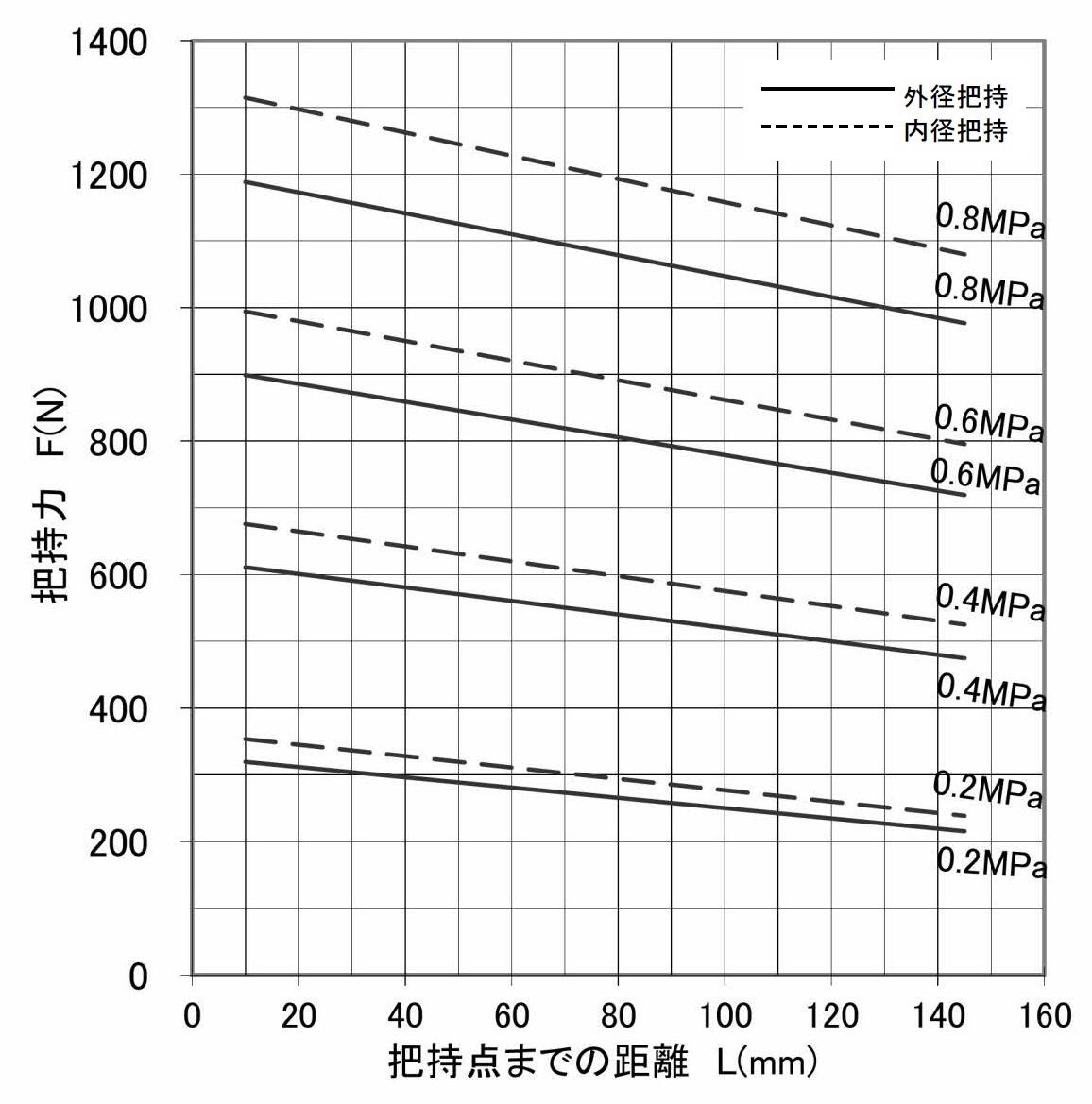
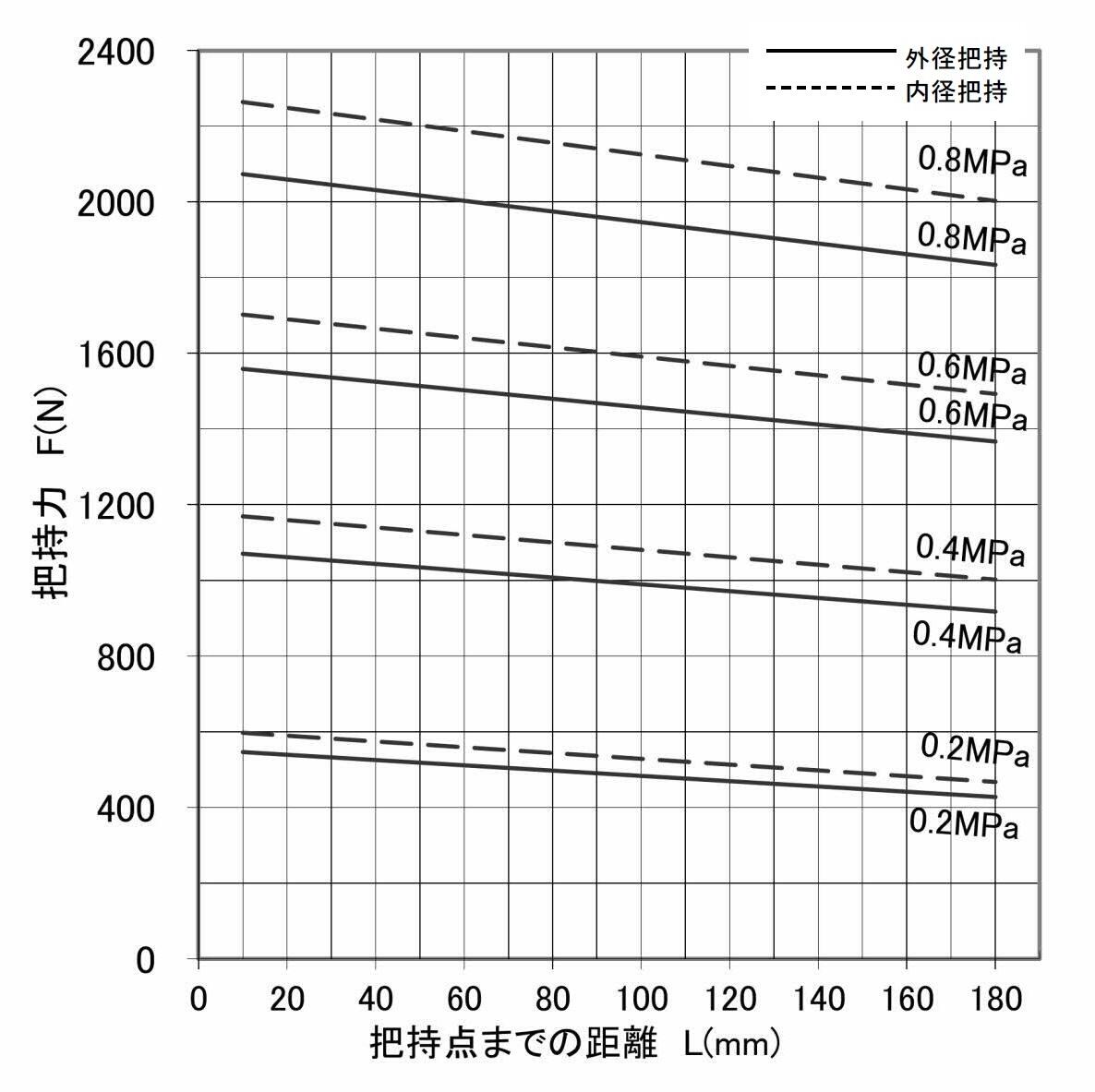
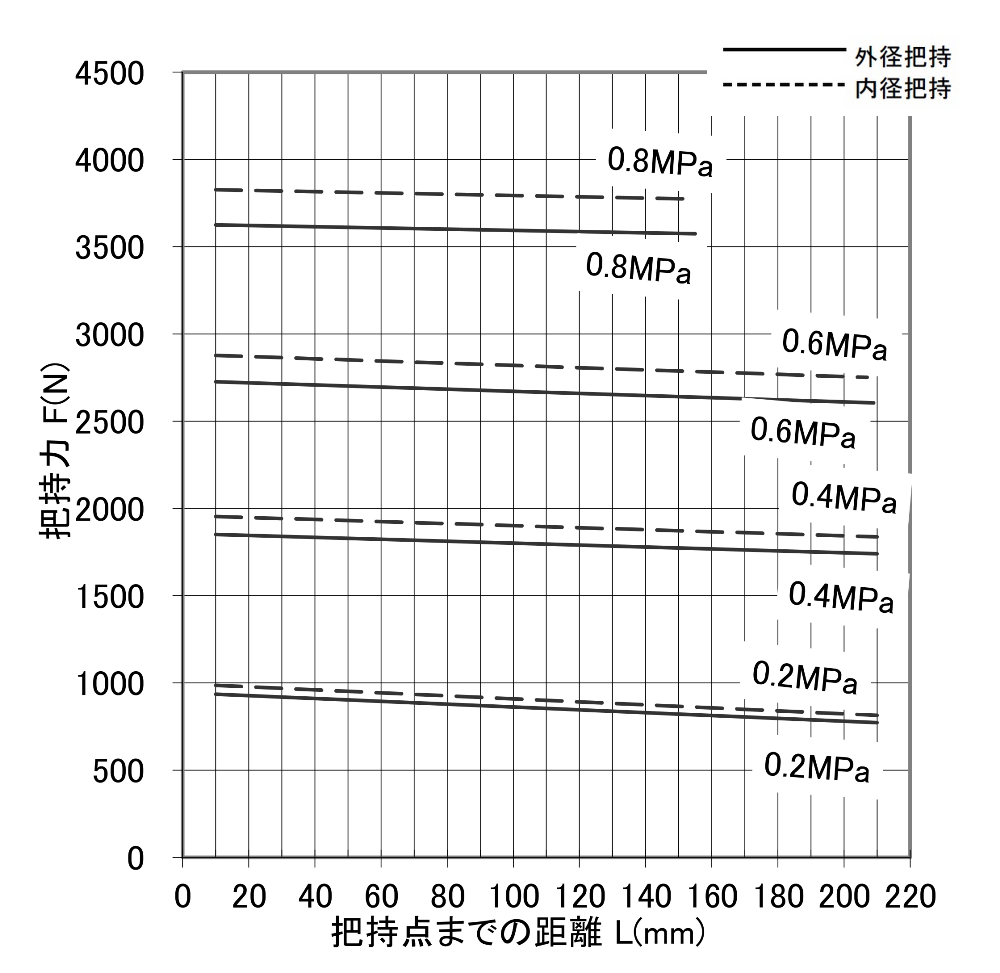
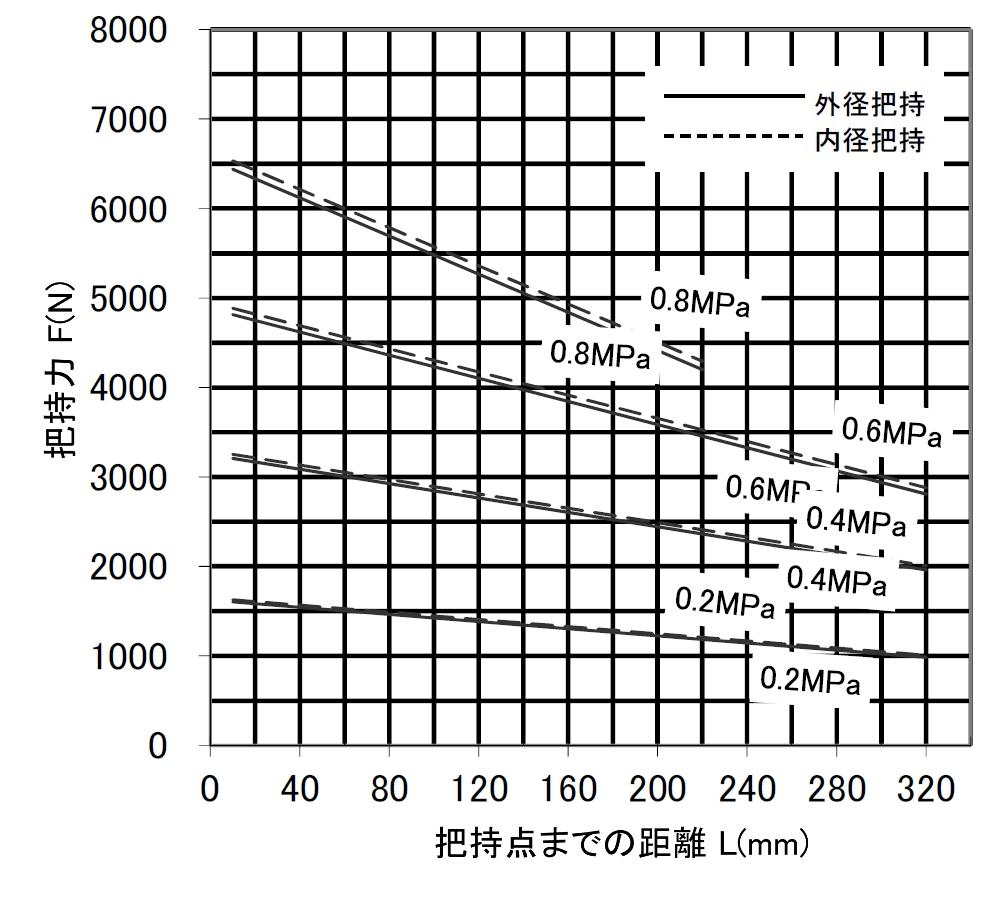
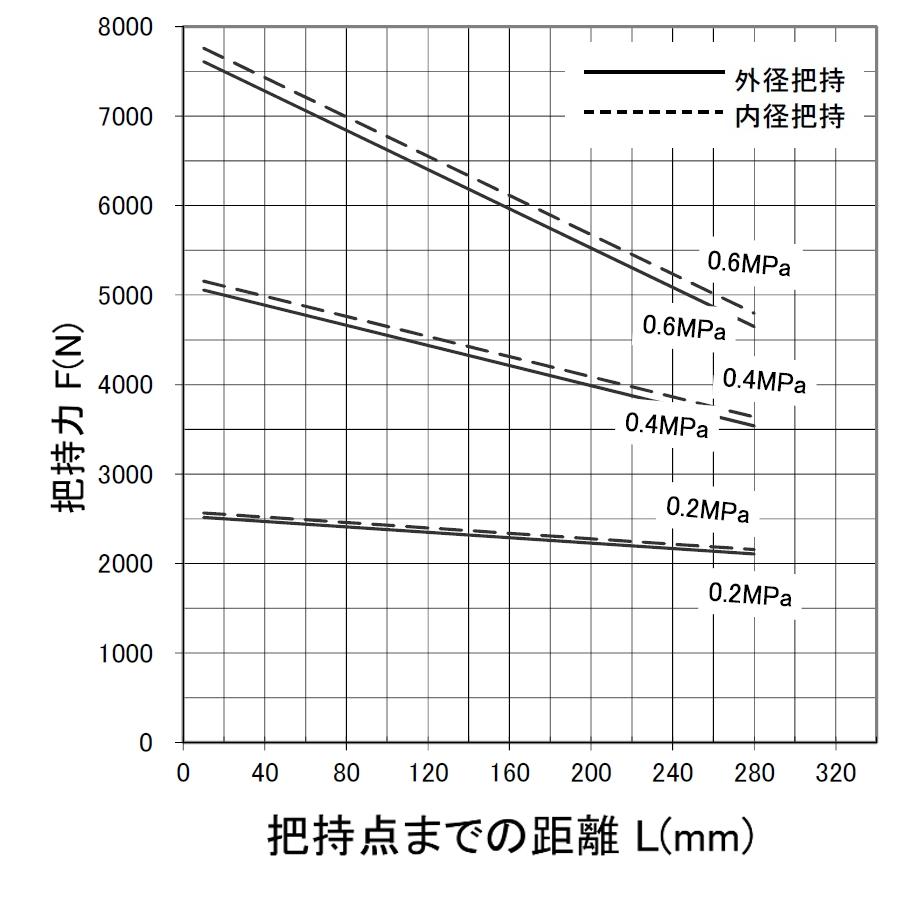
型式を選ぶと把持力線図を表示します。グラフの把持力 F は、1爪当たりの実測把持力 F1× 爪本数を表しています。
NTS206 | NTS208 | NTS210 |
|
|
|
NTS212 | NTS216 | NTS220 |
|
|
|
NTS230-M | NTS230H-M | |
|
|
グリッパの型式、使用空圧力などの把持条件より把持力を計算します。
型 式 | 図面をダウンロード | |||
|---|---|---|---|---|
NTS206 | ||||
NTS208 | ||||
NTS210 | ||||
NTS212 | ||||
NTS216 | ||||
NTS220 | ||||
NTS230-M | ||||
NTS230H-M | ||||
NTS206-B (近接スイッチブラケット) | ||||
NTS208-B (近接スイッチブラケット) | ||||
NTS210-B (近接スイッチブラケット) | ||||
NTS212-B (近接スイッチブラケット) | ||||
NTS216-B (近接スイッチブラケット) | ||||
NTS220-B (近接スイッチブラケット) | ||||
注1) 本体の3Dデータは爪の位置が開端(UC)、閉端(OC)、ストローク中央(HCL) の3種類を含んでいます。
注2) NTS230-M、NTS230H-Mには近接スイッチは使用できません。
製品を検索する SEARCH