ものづくりを未来する。






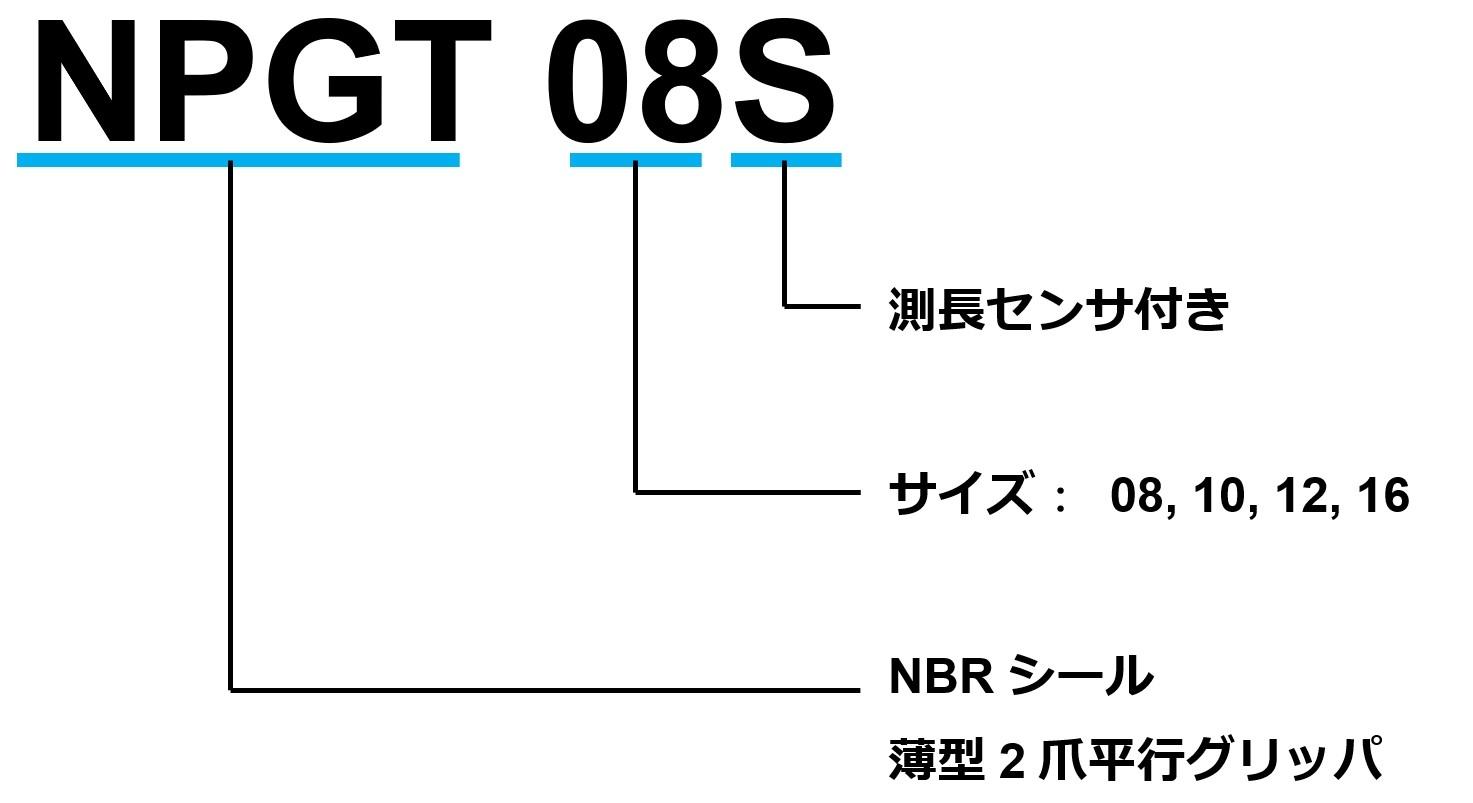
薄型2爪平行グリッパ

スケール内蔵タイプで、ワーク把持部の寸法測定が可能に
薄型ボデーにより、自由度の高いシステム設計が可能
チャック製造の技術を生かし、高精度を実現
同等ストローク汎用モデルより高い把持力を実現
注1 空圧が低下した際にもワークを脱落しないよう空圧回路に逆止弁を使用してください。
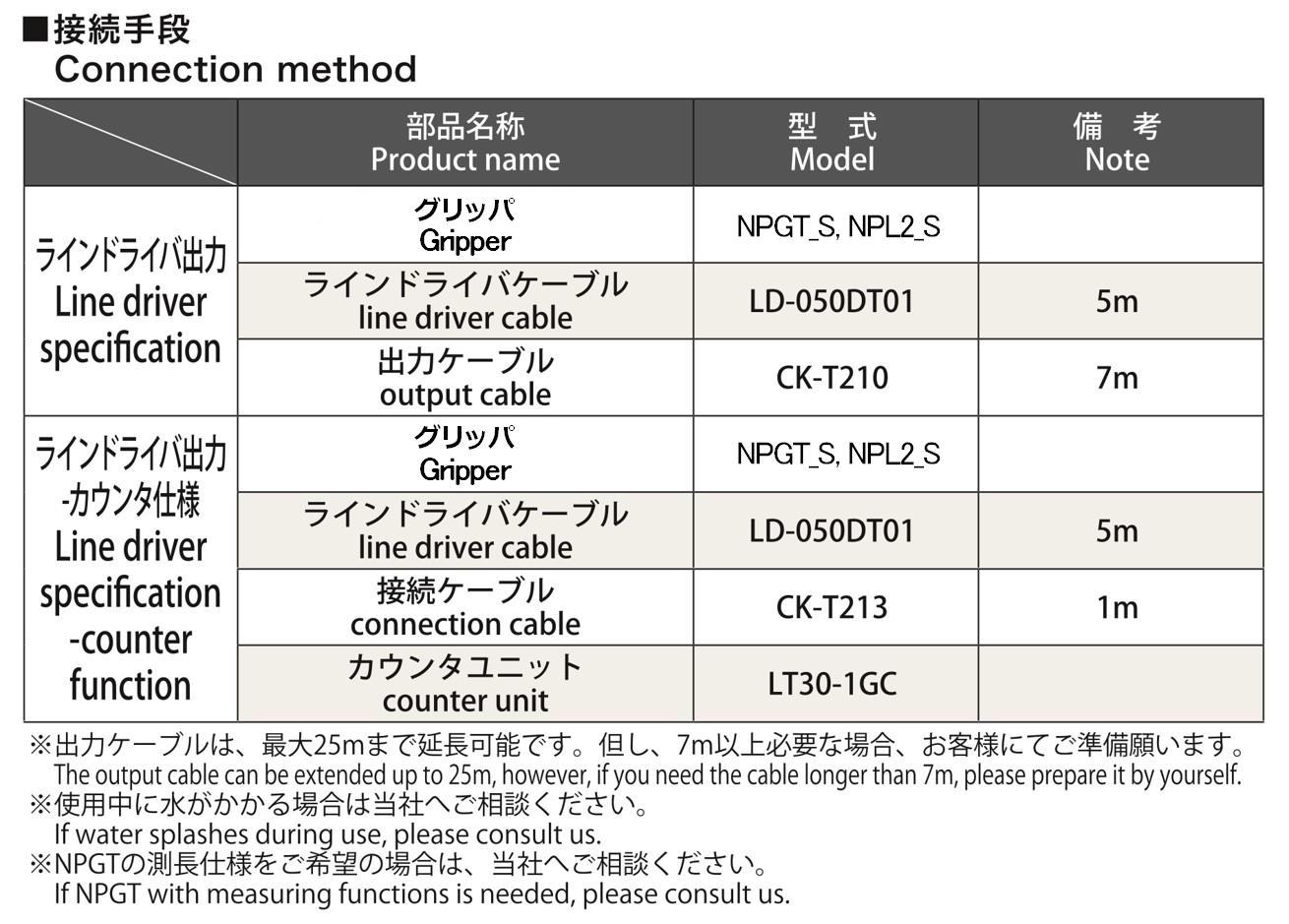
注2 信号の出力形態によりケーブル等のオプション部品が異なりますので、グリッパをご発注時に弊社の営業担当にご用命ください。弊社の営業拠点はこちらからご確認ください。
注3 リードスイッチでジョーストロークを検出される場合は、商品の外周に取付溝を用意していますので、その溝を利用してリードスイッチを取り付けてください。
注4 近接スイッチでジョーストロークを直接検出される場合は別途近接スイッチブラケットをお求めください。
型 式 | 直径でのジョ | 把持力 F(注2) | 繰り返 | 本体 | 流体 | 使用 | 周囲 | ||
|---|---|---|---|---|---|---|---|---|---|
測定距離(注1) | 外径把持 | 内径把持 | |||||||
NPGT08S | 16.6 | 10 | 600 | 500 | ±0.008 | 0.79 | 34 | 0.2~0.8 | 5~60 |
NPGT10S | 20.8 | 10 | 1000 | 860 | ±0.008 | 1.25 | 64 | 0.2~0.8 | 5~60 |
NPGT12S | 26.4 | 10 | 2000 | 1700 | ±0.008 | 2.45 | 152 | 0.2~0.8 | 5~60 |
NPGT16S | 32.6 | 10 | 2800 | 2650 | ±0.008 | 4.60 | 524 | 0.2~0.8 | 5~60 |
(注1) 測定距離はマスタージョー上面から把握中心までの距離です。
(注2) 把持力は供給空圧力0.6MPaでの値です。
(注3) 上表の仕様はスケールなし仕様(NPGT)と同一です。
取扱説明書は2種類ありますので、ご使用される型式のものをご参照ください。
本取扱説明書は測長部分についてのみの説明書ですので、NPGTシリーズ本体の取扱説明書も合わせてご参照ください。NPGTシリーズ本体の取扱説明書はこちらをクリックしてください。
各グリッパの許容負荷は以下のリンクで確認してください。
グリッパ許容負荷
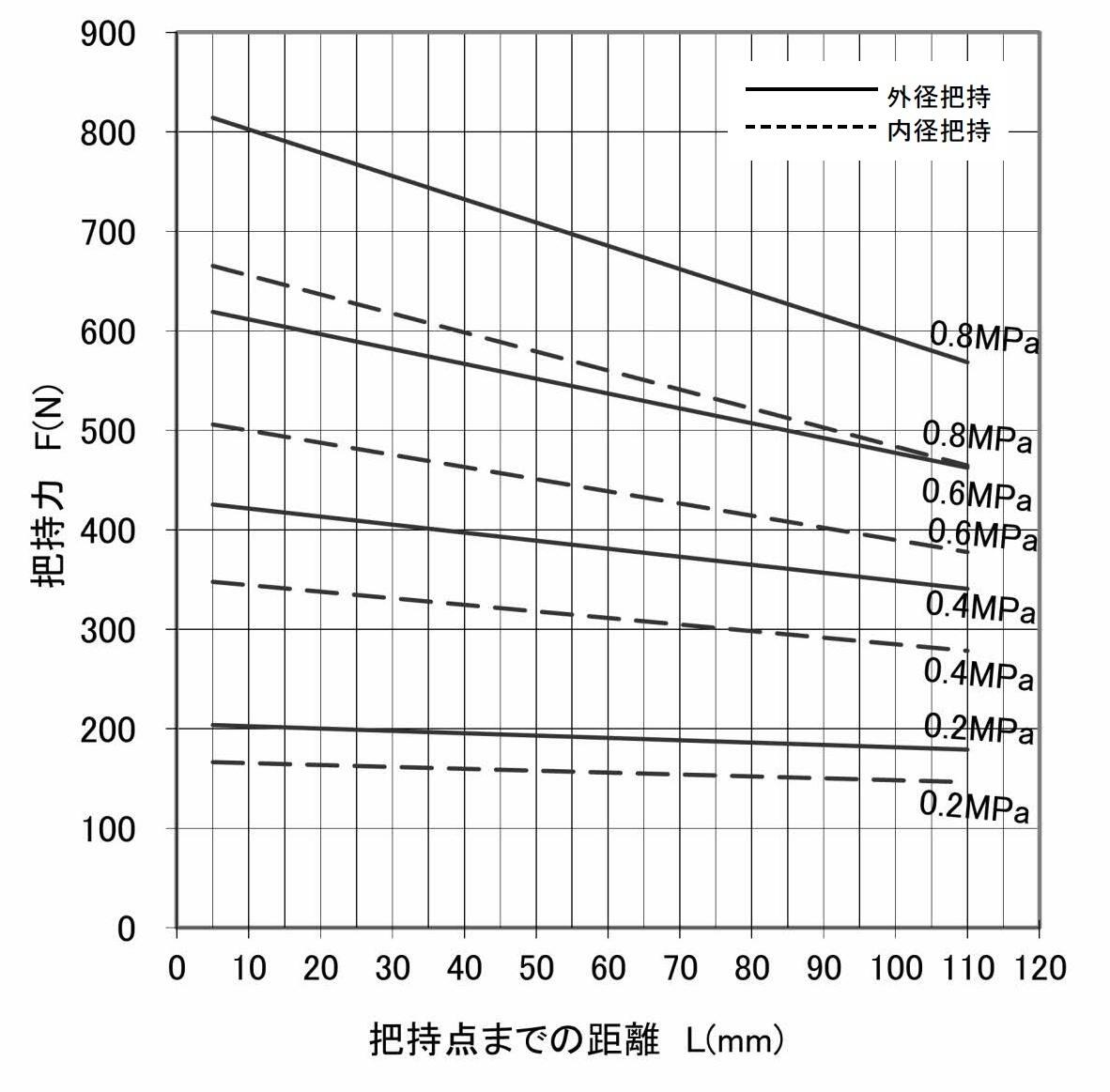
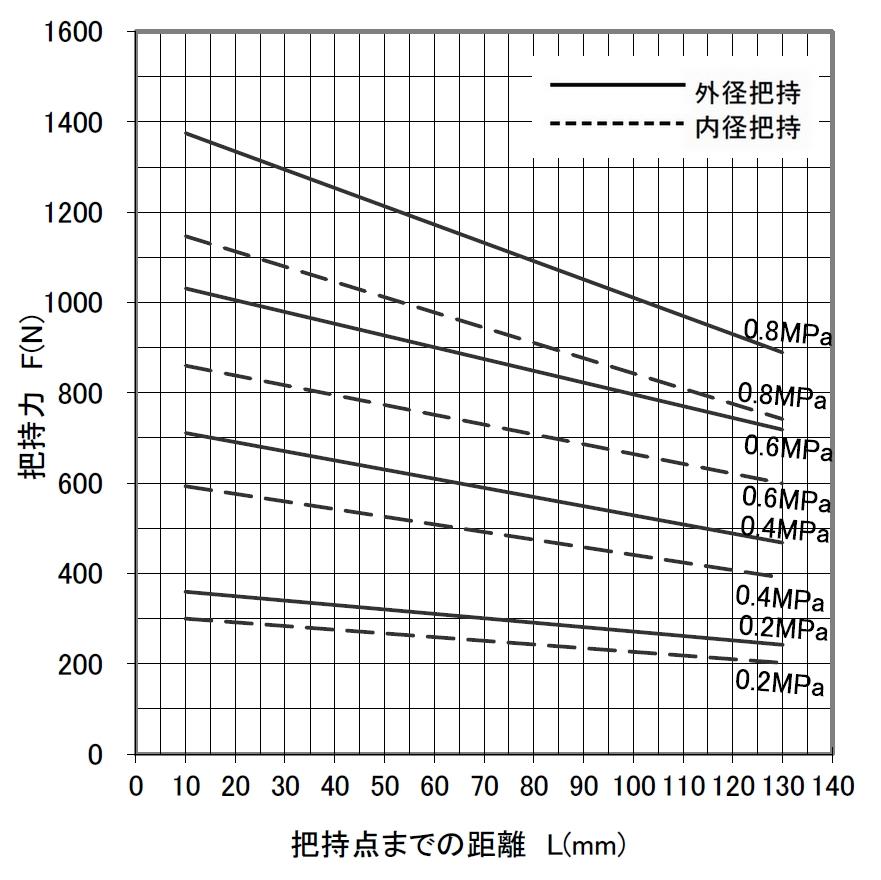
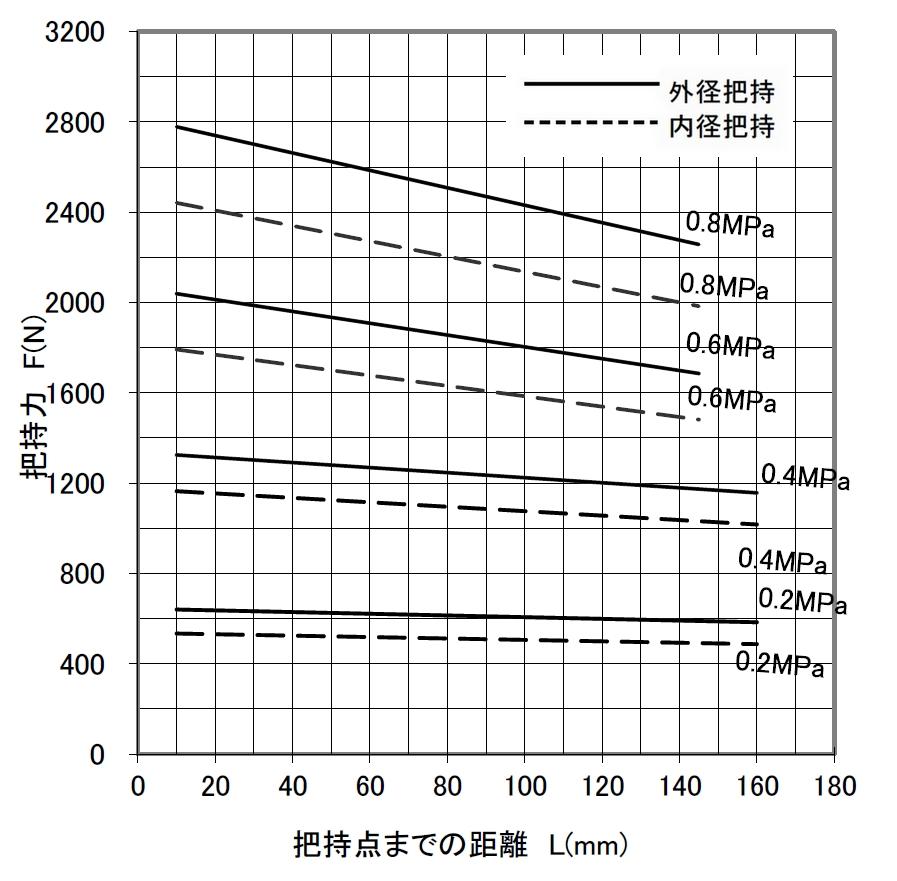
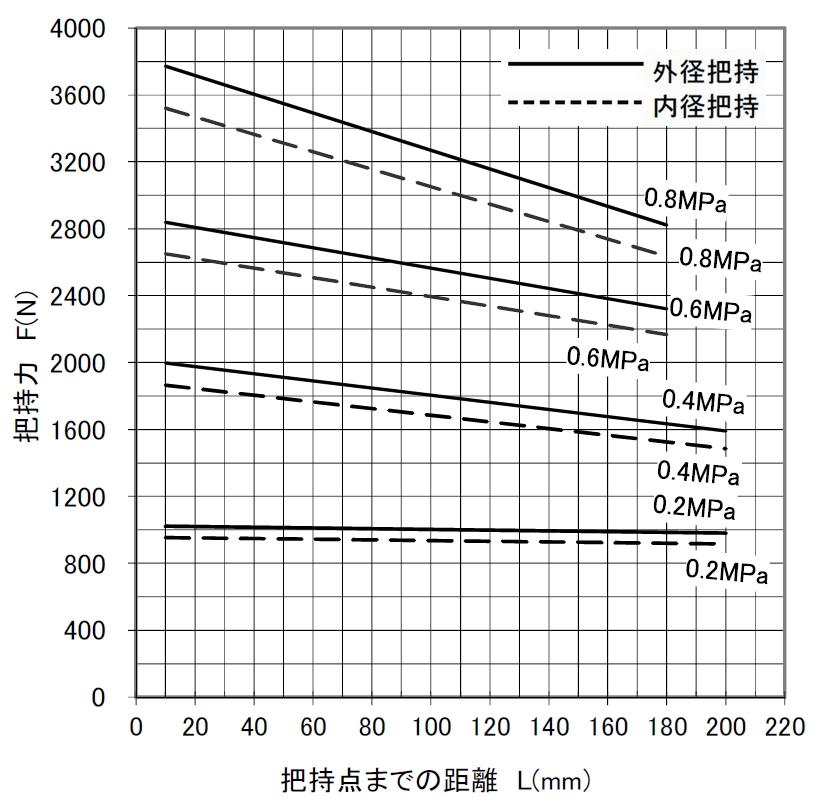
型式を選ぶと把持力線図を表示します。グラフの把持力 F は、1爪当たりの実測把持力 F1× 爪本数を表しています。
NPGT08S | NPGT10S | NPGT12S |
|
|
|
NPGT16S | ||
|
グリッパの型式、使用空圧力などの把持条件より把持力を計算します。
把持力を計算する
製品を検索する SEARCH












{kind=link}