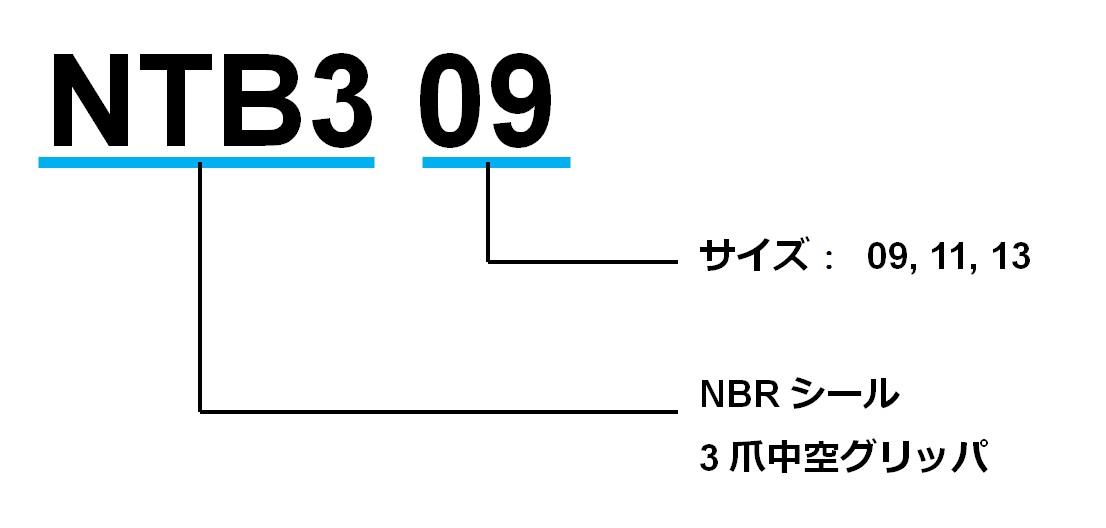
ものづくりを未来する。






3爪平行中空グリッパ
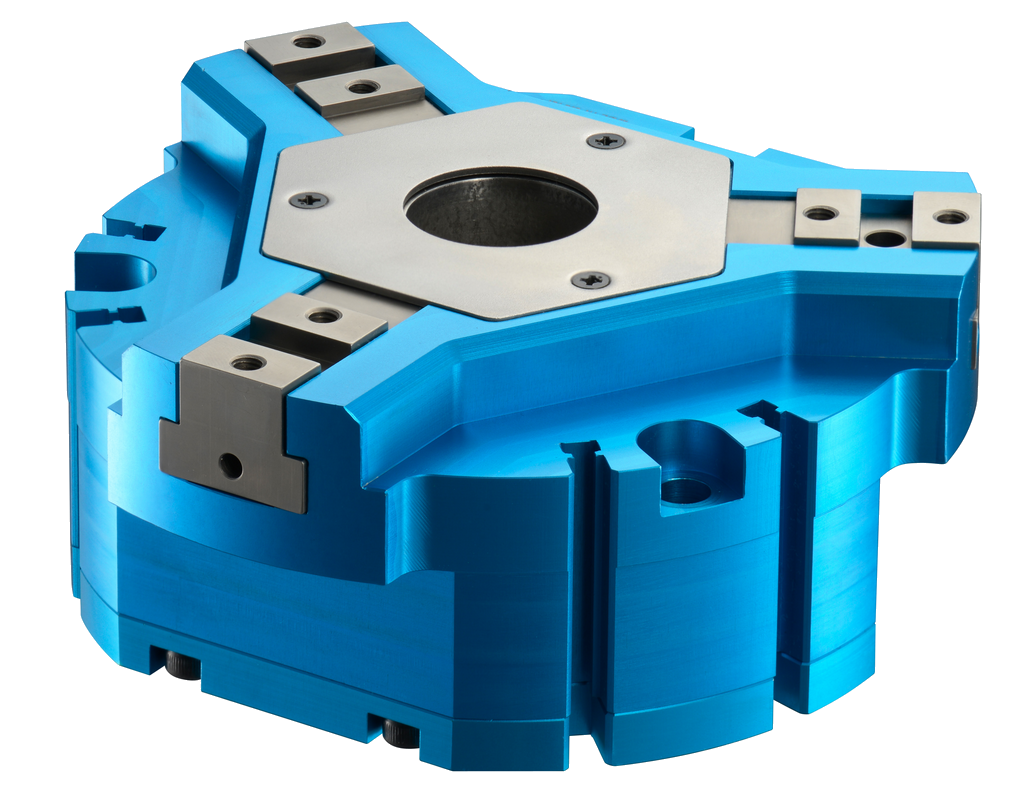
エアブロー等の治具取付けに最適な大きな貫通穴
硬質アルマイト処理により長寿命、長期間高精度維持
薄型化、軽量化
ロボットから取り外さずに分解清掃
上面、下面、側面、中間面とフレキシブルな取付
注1 空圧が低下した際にもワークを脱落しないよう空圧回路に逆止弁を使用してください。
注2 リードスイッチでジョーストロークを検出される場合は、商品の外周に取付溝を用意していますので、その溝を利用してリードスイッチを取り付けてください。
リードスイッチは最大4個まで取付け可能です。
注3 近接スイッチでジョーストロークを直接検出される場合は別途近接スイッチブラケットをお求めください。
型 式 | 直径での | 貫通穴径 | 把持力 F(注2) | 繰り返し精度 | 本体質量 | 流体消費量 | 使用 | 周囲温度 | ||
|---|---|---|---|---|---|---|---|---|---|---|
測定距離(注1) | 外径把持 | 内径把持 | ||||||||
NTB309 | 12 | 14.3 | 10 | 1110 | 1270 | ±0.015 | 0.70 | 38.0 | 0.2~0.8 | 5~60 |
NTB311 | 16 | 25 | 20 | 1510 | 1750 | ±0.015 | 1.20 | 80.4 | 0.2~0.8 | 5~60 |
NTB313 | 20 | 29.9 | 20 | 3580 | 3750 | ±0.015 | 2.10 | 190.1 | 0.2~0.8 | 5~60 |
NTB317 | 25 | 50 | 20 | 7440 | 9000 | ±0.02 | 7.50 | 465.1 | 0.2~0.8 | 5~60 |
(注1) 測定距離はマスタージョー上面から把握中心までの距離です。
(注2) 把持力は供給空圧力0.6MPaでの値です。
各グリッパの許容負荷は以下のリンクで確認してください。
*NTB317には近接スイッチは使用できません。
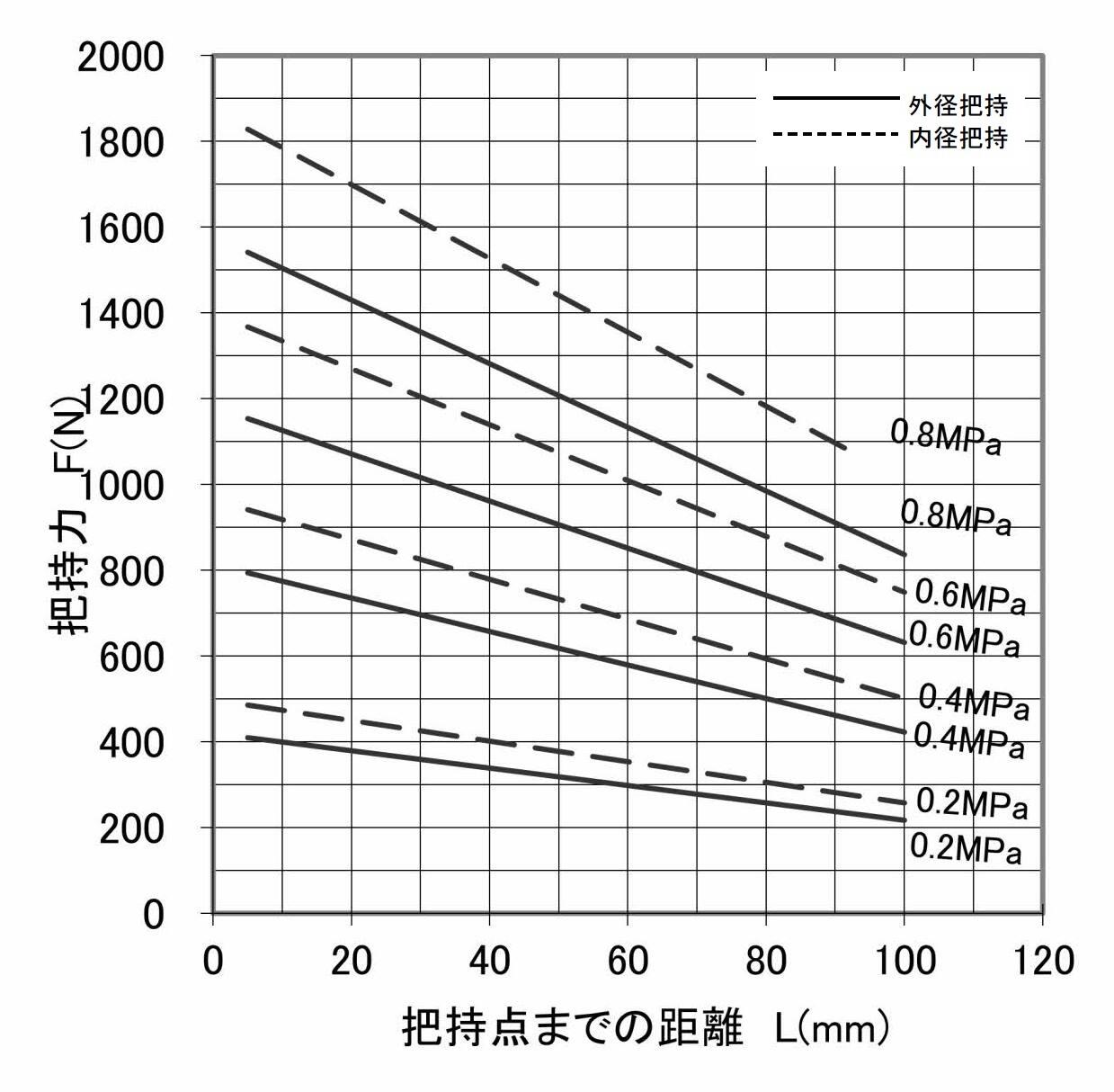
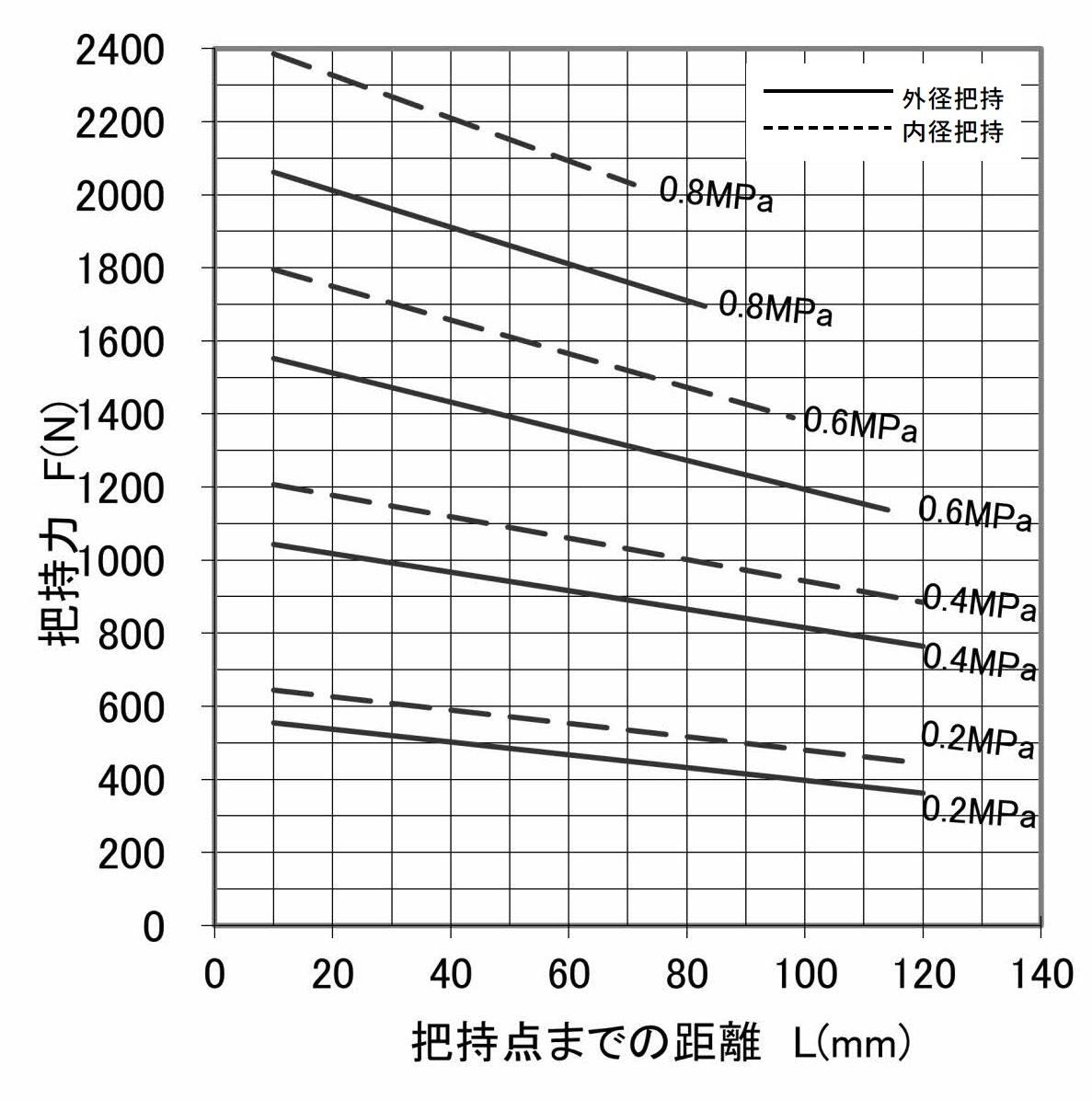
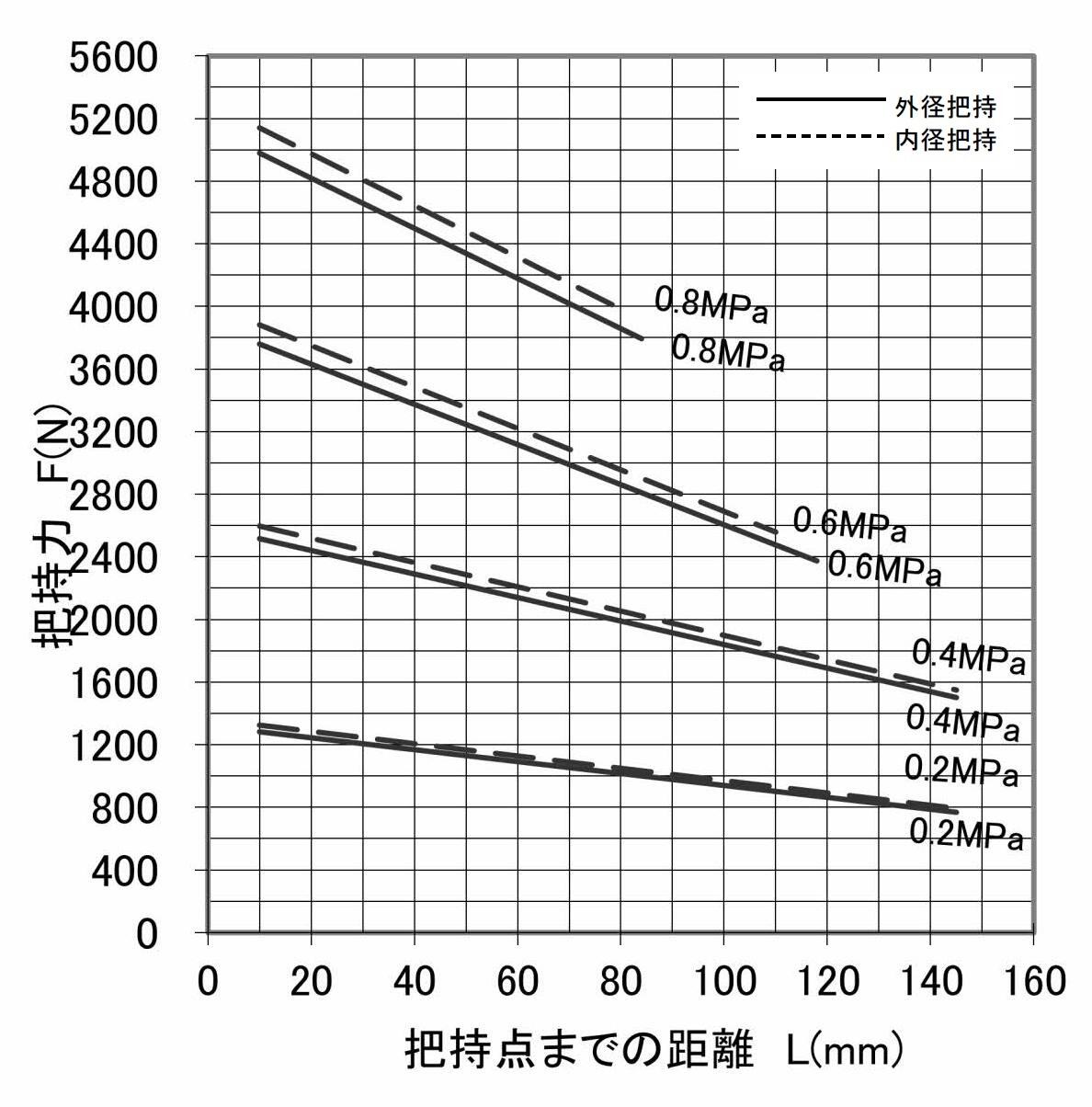
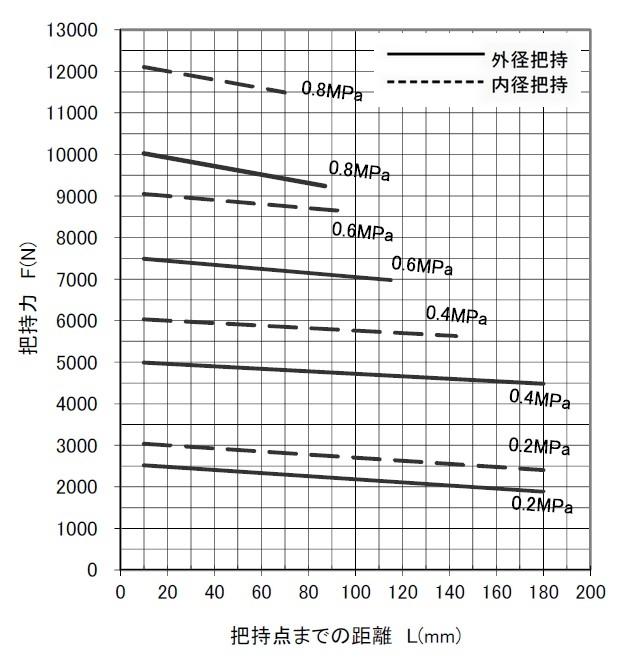
型式を選ぶと把持力線図を表示します。グラフの把持力 F は、1爪当たりの実測把持力 F1× 爪本数を表しています。
NTB309 | NTB311 | NTB313 |
|
|
|
NTB317 | ||
|
グリッパの型式、使用空圧力などの把持条件より把持力を計算します。
製品を検索する SEARCH