ものづくりを未来する。






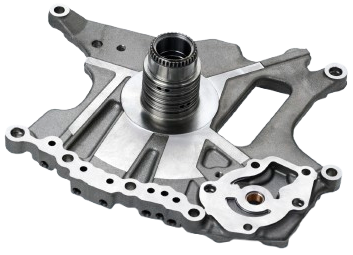
薄物ワークも安定把握

ワーク端面を引込み把握するため、薄肉ワークを歪ませることなく安定した把握が可能
*FGは3爪、FGTは2爪*()内は、FGTシリーズの仕様
型 式 | FG(T)05 | FG(T)06 | FG(T) 08 | ||
|---|---|---|---|---|---|
把握ストローク(mm) | 8 | 8 | 8 | ||
旋回ストローク(mm) | 12 | 12 | 12 | ||
プランジャストローク(mm) | 20 | 20 | 20 | ||
許容最大入力(kN) | 7.5(5) | 9(6) | 18(12) | ||
ジョー1ヶの締付力(kN) | 2 | 2.5 | 5.5 | ||
許容最高回転速度(min-1) | 4000 | 4000 | 3500 | ||
慣性モーメント(kg・m2) | 0.03(0.025) | 0.05(0.045) | 0.14(0.13) | ||
質量(kg) | 12(10) | 13(11) | 24(22) | ||
標準シリンダ | Y1020R | Y1020R | Y1020R | ||
着座用シリンダ | Y1020RE39 | Y1020RE39 | Y1020RE39 | ||
外形図 | FG | ||||
FGT | |||||
TIF | FG | ||||
FGT | |||||
DXF | FG | ||||
FGT | |||||
DWG | FG | ||||
FGT | |||||
Parasolid | FG | ||||
FGT | |||||
STEP | FG | ||||
FGT | |||||
注) それぞれの3DデータはParasolid、STEPともにフィンガーの位置が上端、下端の2種類の状態の図を含んでいます。
型 式 | FG(T)10 | FG(T)12 | ||
|---|---|---|---|---|
把握ストローク(mm) | 8 | 8 | ||
旋回ストローク(mm) | 12 | 12 | ||
プランジャストローク(mm) | 20 | 20 | ||
許容最大入力(kN) | 18(12) | 18(12) | ||
ジョー1ヶの締付力(kN) | 5.5 | 5.5 | ||
許容最高回転速度(min-1) | 3500 | 3000 | ||
慣性モーメント(kg・m2) | 0.31(0.29) | 0.59(0.57) | ||
質量(kg) | 36(34) | 48(46) | ||
標準シリンダ | Y1020R | Y1020R | ||
着座用シリンダ | Y1020RE39 | Y1020RE39 | ||
外形図 | FG | |||
FGT | ||||
TIF | FG | |||
FGT | ||||
DXF | FG | |||
FGT | ||||
DWG | FG | |||
FGT | ||||
Parasolid | FG | |||
FGT | ||||
STEP | FG | |||
FGT | ||||
注) それぞれの3DデータはParasolid、STEPともにフィンガーの位置が上端、下端の2種類の状態の図を含んでいます。
製品を検索する SEARCH