ものづくりを未来する。






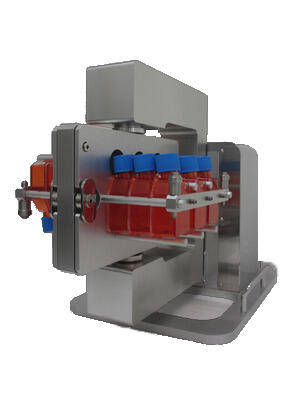
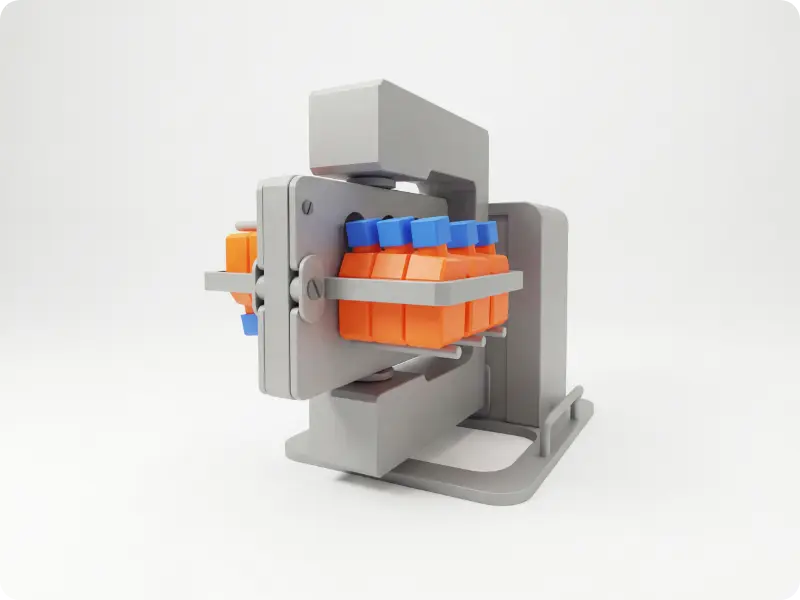
簡単に取付可能なハンドユニット

高把持力で重量ワークの安定した搬送が可能
高剛性ボデ-採用により高い繰り返し精度を実現
ロボット可搬重量を制限しない軽量コンパクト設計
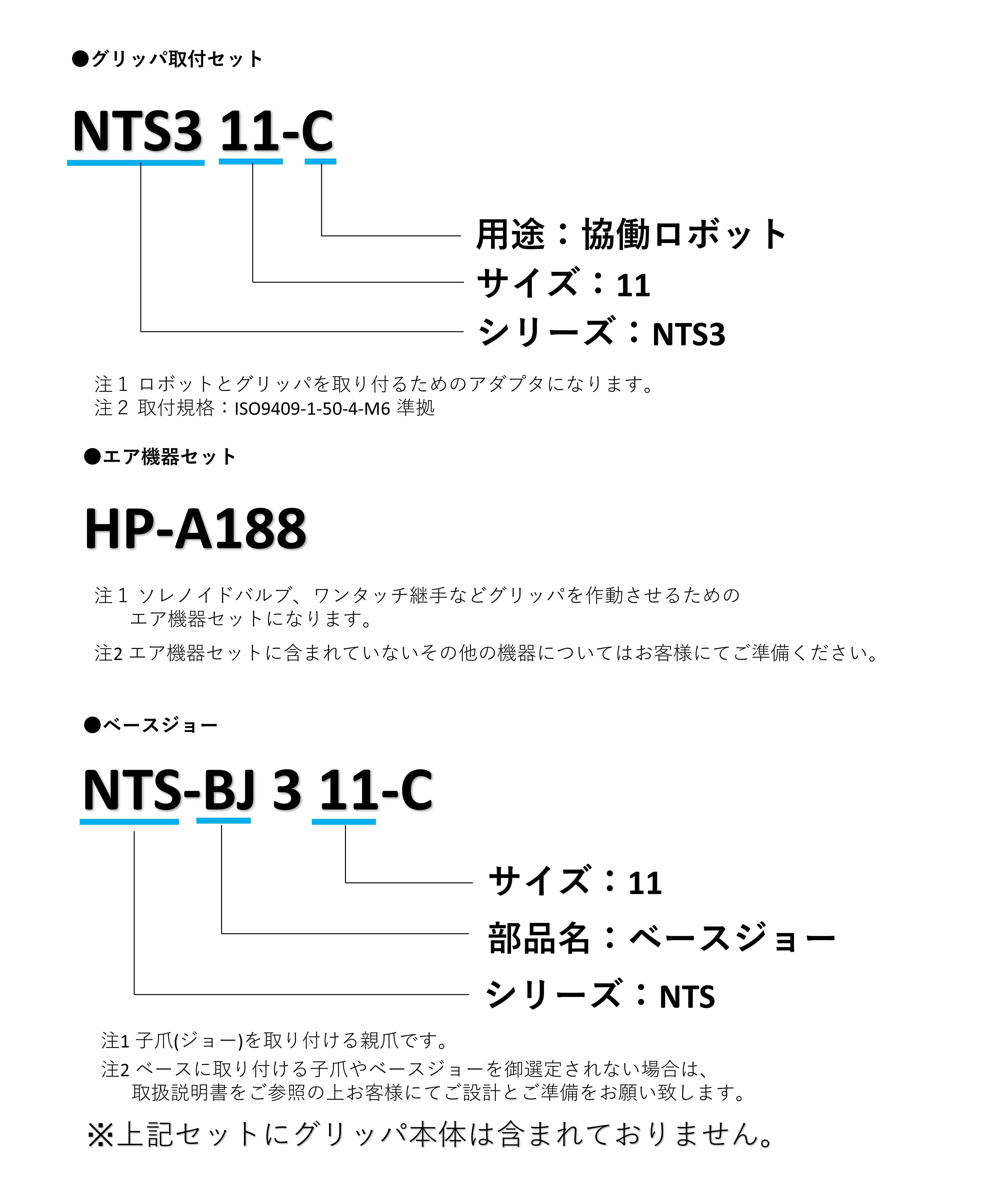
ロボットハンドの取付けに必要な周辺機器(アダプタ、エア機器、ジョー)がセットになっており、機器選定の手間を削減
型 式 | 直径でのジョーストローク | 把持力 F(注2) | 繰り返し精度 | 本体質量 | 流体消費量 | 使用空圧力 | 周囲温度 | ||
|---|---|---|---|---|---|---|---|---|---|
測定距離(注1) | 外径把持 | 内径把持 | |||||||
NTS311 | 20 | 20 | 1810 | 1930 | ±0.01 | 1.21 | 112 | 0.2~0.8 | 5~60 |
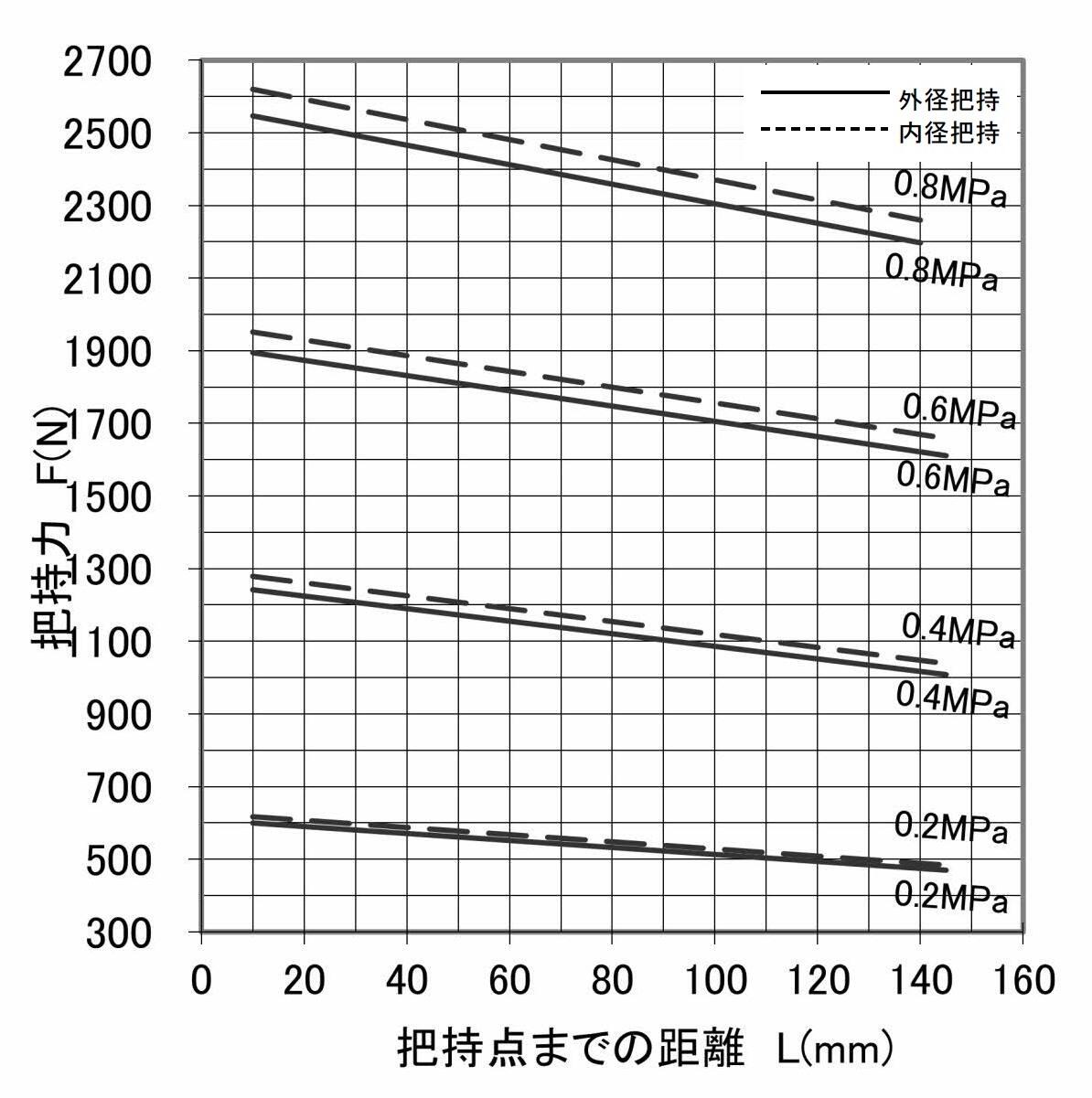
(注1) 測定距離はマスタージョー上面から把握中心までの距離です。
(注2) 把持力は供給空圧力0.6MPaでの値です。
(注3) 対象型式は今後追加されます。
型式を選ぶと把持力線図を表示します。グラフの把持力 F は、1爪当たりの実測把持力 F1× 爪本数を表しています。
NTS311 |
|
グリッパの型式、使用空圧力などの把持条件より把持力を計算します。
製品を検索する SEARCH